Imitation Learning and Fine-Tuning¶
Imitation learning refers to the task of learning a policy by imitating the behaviour of an existing teacher policy usually represented as a fixed set of example trajectories. In some scenarios we might even have direct access to the actual teacher policy itself allowing us to generate as many training trajectories as required. Imitation learning is especially useful for initializing a policy to quick-start an actual training by interaction run or for settings where no training environment is available at all (e.g., offline RL).
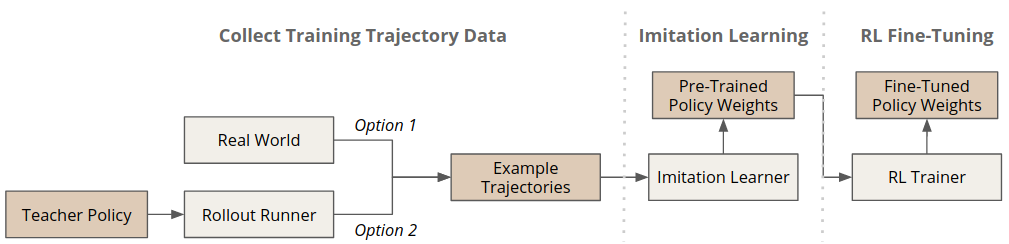
Collect Training Trajectory Data¶
This section explains how to rollout a policy for collecting example trajectories. As the training trajectories might be already available (e.g., collected in practice) this step is optional.
As an example environment we pick the discrete version of the LunarLander environment as it already provides a heuristic policy which we can use to collect or training trajectories for imitation learning.
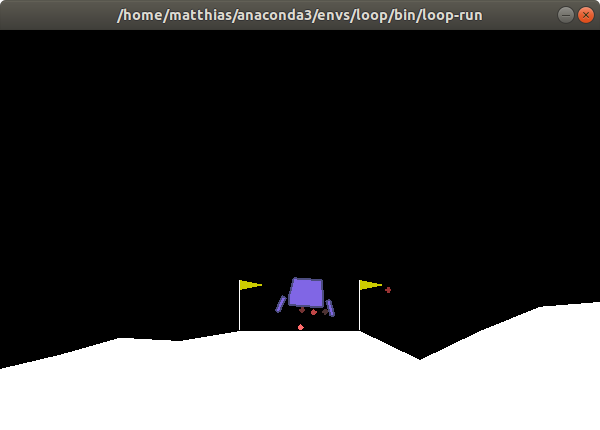
But first let’s check if the policy actually does something meaningful by running a few rendering rollouts:
maze-run env.name=LunarLander-v3 policy=lunar_lander_heuristics runner=sequential runner.render=true runner.n_episodes=3
Hopefully this looks good and we can continue with actually collecting example trajectories for imitation learning.
The command bellow performs 3 rollouts of the heuristic policy and records them to the output directory.
maze-run env.name=LunarLander-v3 policy=lunar_lander_heuristics runner.n_episodes=3
You will get the following output summarizing the statistics of the rollouts.
step|path | value
=====|======================================================================|================
1|rollout_stats DiscreteActionEvents action| substep_0/action |[len:583, μ:1.2]
1|rollout_stats BaseEnvEvents reward| median_step_count | 200.000
1|rollout_stats BaseEnvEvents reward| mean_step_count | 194.333
1|rollout_stats BaseEnvEvents reward| total_step_count | 583.000
1|rollout_stats BaseEnvEvents reward| total_episode_count | 3.000
1|rollout_stats BaseEnvEvents reward| episode_count | 3.000
1|rollout_stats BaseEnvEvents reward| std | 51.350
1|rollout_stats BaseEnvEvents reward| mean | 190.116
1|rollout_stats BaseEnvEvents reward| min | 121.352
1|rollout_stats BaseEnvEvents reward| max | 244.720
The trajectories will be dumped similar to the file structure shown below.
- outputs/<experiment_path>
- maze_cli.log
- event_logs
- trajectory_data
- 00653455-d7e2-4737-a82b-d6d1bfce12f7.pkl
- ...
The pickle files contain the distinct episodes recorded as
StateTrajectoryRecord objects,
each containing a sequence of
StateRecord objects,
which keep the trajectory data for one step (state, action, reward, …).
Learn from Example Trajectories¶
Given the trajectories recorded in the previous step we now train a policy with behavioral cloning, a simple version of imitation learning.
To do so we simply provide the trajectory data as an argument and run:
maze-run -cn conf_train env.name=LunarLander-v3 model=vector_obs wrappers=vector_obs algorithm=bc algorithm.validation_percentage=50 runner.dataset.dir_or_file=<absolute_experiment_path>/trajectory_data
...
********** Epoch 24: Iteration 1500 **********
step|path | value
=====|========================================================================|=========
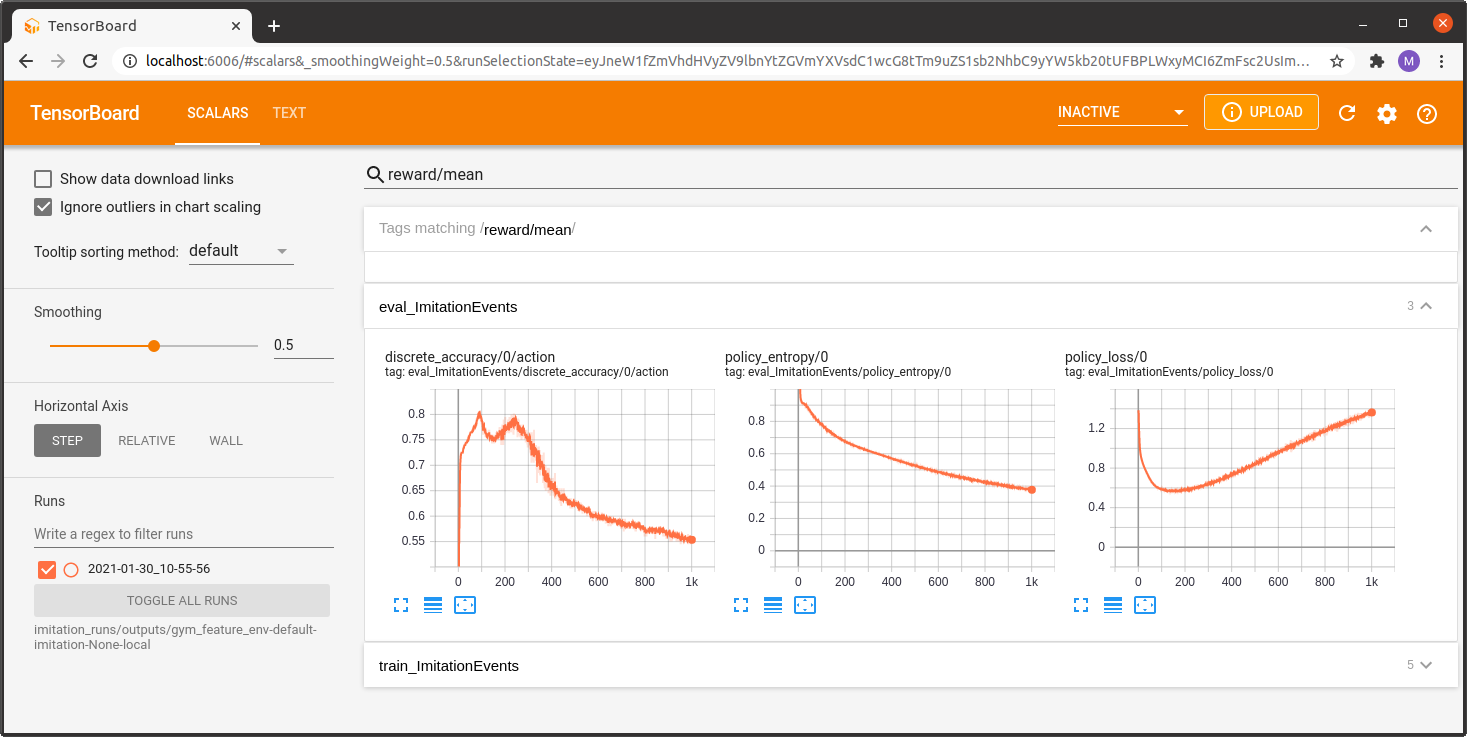
96|train ImitationEvents discrete_accuracy 0/action | 0.948
96|train ImitationEvents policy_loss 0 | 0.150
96|train ImitationEvents policy_entropy 0 | 0.209
96|train ImitationEvents policy_l2_norm 0 | 42.416
96|train ImitationEvents policy_grad_norm 0 | 0.870
step|path | value
=====|========================================================================|=========
96|eval ImitationEvents discrete_accuracy 0/action | 0.947
96|eval ImitationEvents policy_loss 0 | 0.152
96|eval ImitationEvents policy_entropy 0 | 0.207
-> new overall best model -0.15179!
...
As with all trainers, we can watch the training progress with Tensorboard.
tensorboard --logdir outputs/
Once training is complete we can check how the behaviourally cloned policy performs in action.
maze-run env.name=LunarLander-v3 model=vector_obs wrappers=vector_obs policy=torch_policy input_dir=outputs/<imitation-learning-experiment>
step|path | value
=====|=====================================================================|=================
1|rollout_stats DiscreteActionEvents action substep_0/action |[len:8033, μ:1.2]
1|rollout_stats BaseEnvEvents reward median_step_count | 186.000
1|rollout_stats BaseEnvEvents reward mean_step_count | 160.660
1|rollout_stats BaseEnvEvents reward total_step_count | 8033.000
1|rollout_stats BaseEnvEvents reward total_episode_count | 50.000
1|rollout_stats BaseEnvEvents reward episode_count | 50.000
1|rollout_stats BaseEnvEvents reward std | 111.266
1|rollout_stats BaseEnvEvents reward mean | 101.243
1|rollout_stats BaseEnvEvents reward min | -164.563
1|rollout_stats BaseEnvEvents reward max | 282.895
With a mean reward of 101 this already looks like a promising starting point for RL fine-tuning.
Fine-Tune a Pre-Trained Policy¶
In the last section we show how to fine-tune the pre-trained policy with a model-free RL learner such as PPO. It is basically a standard PPO training run initialized with the imitation learning output.
maze-run -cn conf_train env.name=LunarLander-v3 model=vector_obs critic=template_state wrappers=vector_obs algorithm=ppo runner.eval_repeats=100 runner.critic_burn_in_epochs=10 input_dir=outputs/<imitation-learning-experiment>
Once training started we can observe the progress with Tensorboard (for the sake of clarity of this example we renamed the experiment directories for the screenshot below).
The Tensorboard log below compares the following experiments:
a randomly initialized policy trained with learning rate 0.0 (random-PPO-lr0)
a behavioural cloning pre-trained policy trained with learning rate 0.0 (pre_trained-PPO-lr0)
a randomly initialized policy trained with PPO (from_scratch-PPO)
a behavioural cloning pre-trained policy trained with PPO (pre_trained-PPO)
We also included training runs with a learning rate of 0.0 to get a feeling for the performance of the initial performance of the two models (randomly initialized vs. pre-trained).
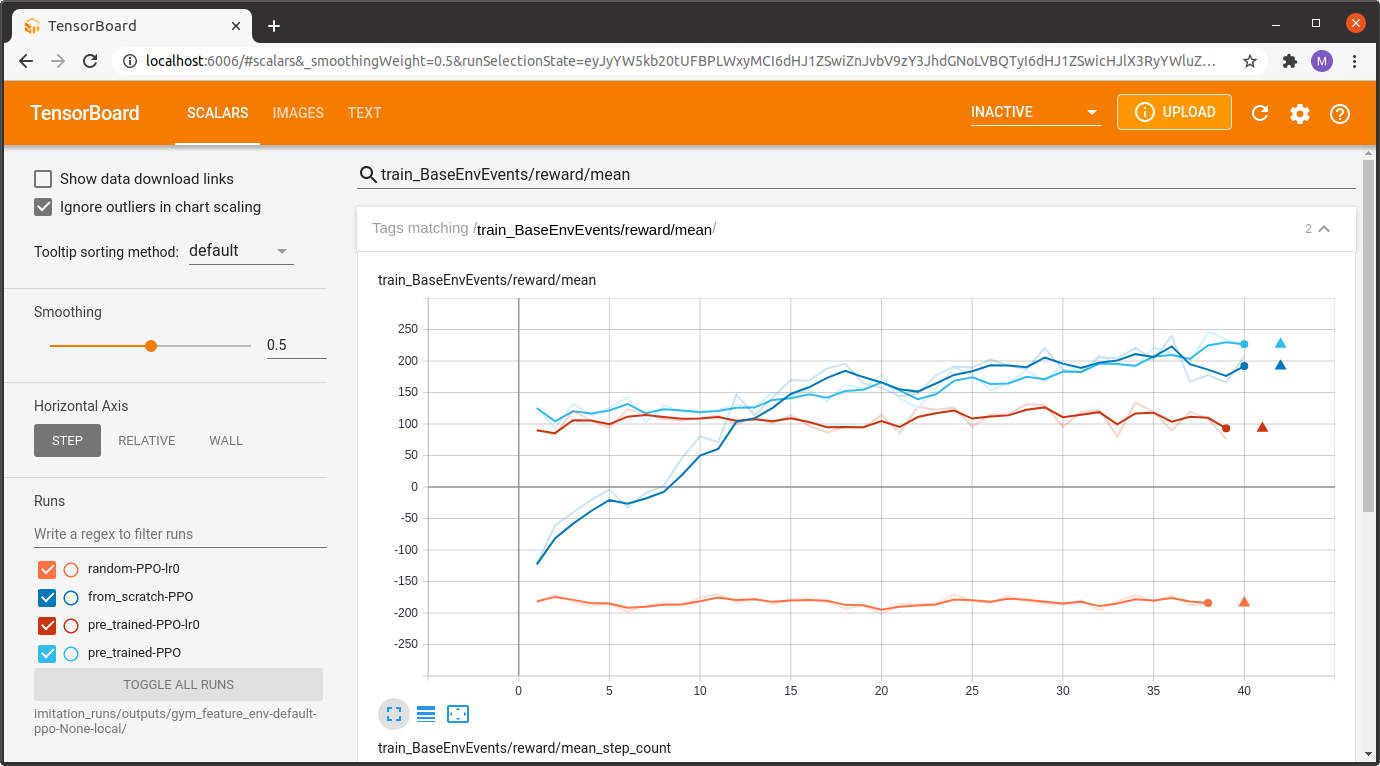
As expected, we see that PPO fine-tuning of the pretrained model starts at an initially much higher reward level compared to the model trained entirely from scratch.
Although this is a quite simple example it is still a nice showcase for the usefulness of this two-stage learning paradigm. For scenarios with delayed and/or sparse rewards following this principle is often crucial to get the RL trainer to start learning at all.
Where to Go Next¶
You can find more details on training and rollouts on the dedicated pages.
You can also read up on how to visualize recorded rollouts.
For further details on the learning algorithms you can visit the Trainers page.