7. Training with Events and KPIs¶
The complete code for this part of the tutorial can be found here
# file structure
- cutting_2d
- main.py
- env ...
- space_interfaces ...
- conf
- env
- tutorial_cutting_2d_events.yaml # new
- model
- tutorial_cutting_2d_events.yaml # new
- wrappers
- tutorial_cutting_2d_events.yaml # new
7.1. Hydra Configuration¶
The entire structure of this example is identical to the one on training the MazeEnv. Everything regarding the event systems was already changed in the section on adding events and KPIs and the trainers will consider these changes implicitly.
7.2. Training an Agent¶
To retrain the agent on the environment extended with event and KPI logging, run
maze-run -cn conf_train env=tutorial_cutting_2d_events wrappers=tutorial_cutting_2d_events \
model=tutorial_cutting_2d_events algorithm=ppo
Running the trainer should print an extended command line output similar to the one shown below. In addition to base events we now also get a statistics log of CuttingEvents, InventoryEvents and KPIs.
step|path | value
=====|============================================================================|====================
6|train MultiStepActorCritic..time_epoch ······················| 24.548
6|train MultiStepActorCritic..time_rollout ······················| 0.762
6|train MultiStepActorCritic..learning_rate ······················| 0.000
6|train MultiStepActorCritic..policy_loss 0 | -0.020
6|train MultiStepActorCritic..policy_grad_norm 0 | 0.013
6|train MultiStepActorCritic..policy_entropy 0 | 0.760
6|train MultiStepActorCritic..critic_value 0 | -49.238
6|train MultiStepActorCritic..critic_value_loss 0 | 50.175
6|train MultiStepActorCritic..critic_grad_norm 0 | 0.500
6|train MultiStepActorCritic..time_update ······················| 1.210
6|train DiscreteActionEvents action substep_0/order | [len:8000, μ:0.0]
6|train DiscreteActionEvents action substep_0/piece_idx | [len:8000, μ:174.2]
6|train DiscreteActionEvents action substep_0/rotation | [len:8000, μ:1.0]
6|train BaseEnvEvents reward median_step_count | 200.000
6|train BaseEnvEvents reward mean_step_count | 200.000
6|train BaseEnvEvents reward total_step_count | 48000.000
6|train BaseEnvEvents reward total_episode_count | 240.000
6|train BaseEnvEvents reward episode_count | 40.000
6|train BaseEnvEvents reward std | 38.427
6|train BaseEnvEvents reward mean | -182.175
6|train BaseEnvEvents reward min | -323.000
6|train BaseEnvEvents reward max | -119.000
6|train InventoryEvents piece_replenished mean_episode_total | 15.325
6|train InventoryEvents piece_discarded mean_episode_total | 67.400
6|train InventoryEvents pieces_in_inventory step_max | 200.000
6|train InventoryEvents pieces_in_inventory step_mean | 200.000
6|train CuttingEvents valid_cut mean_episode_total | 116.075
6|train CuttingEvents invalid_cut mean_episode_total | 83.925
6|train BaseEnvEvents kpi max/raw_piece_usage_..| 0.135
6|train BaseEnvEvents kpi min/raw_piece_usage_..| 0.020
6|train BaseEnvEvents kpi std/raw_piece_usage_..| 0.028
6|train BaseEnvEvents kpi mean/raw_piece_usage..| 0.077
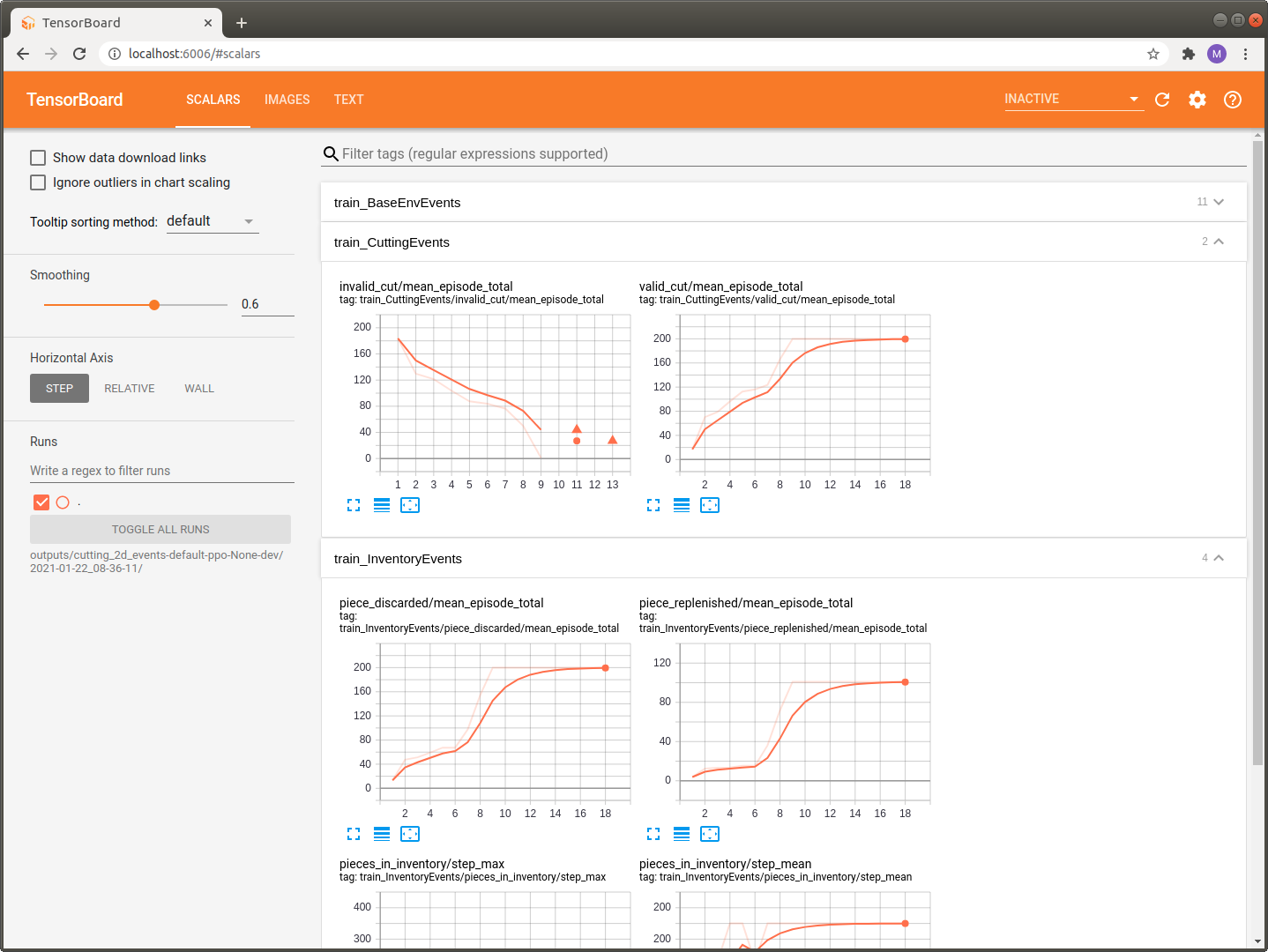
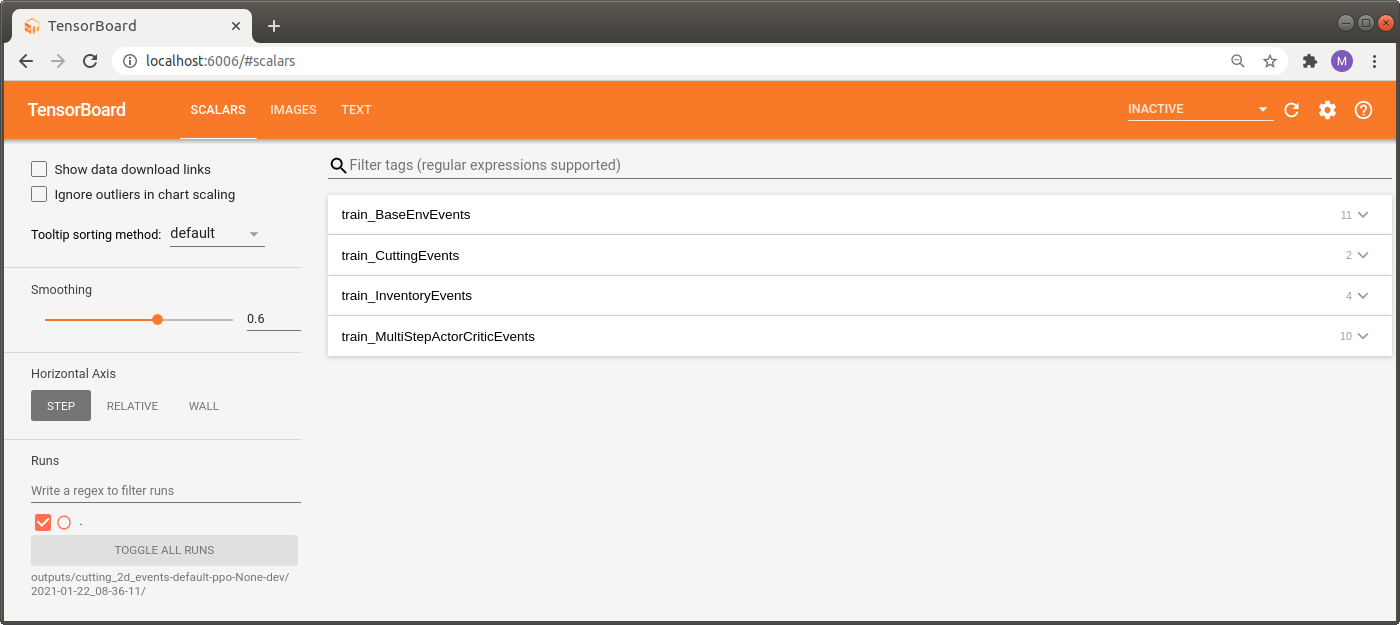
Of course these changes are also reflected in the Tensorboard log which you can again view with your browser at http://localhost:6006/.
tensorboard --logdir outputs
As you can see we now have the two additional sections train_CuttingEvents and train_InventoryEvents available.
A closer look at these events reveals that the agent actually starts to learn something meaning full as the number of invalid cuts decreases which of course implies that the number of valid cuts increases and we are able to full fill the current customer demand.