Observation Normalization¶
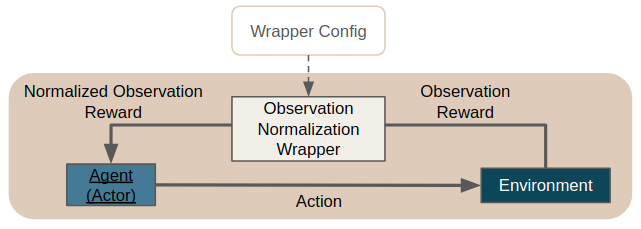
For efficient RL training it is crucial that the inputs (e.g. observations) to our models (e.g. policy and value networks) follow a certain distribution and exhibit values living within a certain range. To ensure this precondition Maze provides general and customizable functionality for normalizing the observations returned by the respective environments via the ObservationNormalizationWrapper.
This means to gain access to observation normalization and to the features listed below you simply have to add the ObservationNormalizationWrapper to your wrapper stack in your Hydra configuration.
To get started you can also just copy one of our Hydra config snippets below or use it directly within Python.
List of Features¶
So far observation normalization supports:
Different normalization strategies ([mean-zero-std-one, range[0, 1], …)
Estimating normalization statistics from observations collected by interacting with the respective environment (prior to training)
Providing an action sampling policy for collecting these normalization statistics
Manually specification of normalization statistics in case they are know beforehand
Excluding observations such as action masks from normalization
Preserving these statistics for continuing a training run, subsequent rollouts or deploying an agent
Gym dictionary observation spaces
Extendability with custom observation normalization strategies on the fly
As not all of the features listed above might be required right from the beginning you can find Hydra config examples with increasing complexity below.
Example 1: Normalization with Estimated Statistics¶
This example applies default observation normalization to all observations with statistics automatically estimated via sampling.
# @package wrappers
maze.core.wrappers.observation_normalization.observation_normalization_wrapper.ObservationNormalizationWrapper:
# default behaviour
default_strategy: maze.normalization_strategies.MeanZeroStdOneObservationNormalizationStrategy
default_strategy_config:
clip_range: [~, ~]
axis: ~
default_statistics: ~
statistics_dump: statistics.pkl
sampling_policy:
_target_: maze.core.agent.random_policy.RandomPolicy
exclude: ~
manual_config: ~
Details:
Applies mean zero - standard deviation one normalization to all observations contained in the dictionary observation space
Does not clip observations after normalization
Does not compute individual normalization statistics along different axis of the observation vector / matrix
Dumps the normalization statistics to the file “statistics.pkl”
Estimates the required statistics from observations collected via random sampling
Does not exclude any observations from normalization
Does not provide any normalization statistics manually
Example 2: Normalization with Manual Statistics¶
In this example, we manually specify both the default normalization strategy and its corresponding default statistics. This is useful, e.g., when working with RGB pixel observation spaces. However, it requires to know the normalization statistics beforehand.
# @package wrappers
maze.core.wrappers.observation_normalization.observation_normalization_wrapper.ObservationNormalizationWrapper:
# default behaviour
default_strategy: maze.normalization_strategies.RangeZeroOneObservationNormalizationStrategy
default_strategy_config:
clip_range: [0, 1]
axis: ~
default_statistics:
min: 0
max: 255
statistics_dump: statistics.pkl
sampling_policy:
_target_: maze.core.agent.random_policy.RandomPolicy
exclude: ~
manual_config: ~
Details:
Add range-zero-one normalization with manually set statistics to all observations
Clips the normalized observation to range [0, 1] in case something goes wrong. (As this example expects RGB pixel observations to have values between 0 and 255 this should not have an effect.)
Subtracts 0 from each value contained in the observation vector / matrix and then divides it by 255
The remaining settings do not have an effect here
Example 3: Custom Normalization and Excluding Observations¶
This advanced example shows how to utilize the full feature set of observation normalization. For explanations please see the comments and details below.
# @package wrappers
maze.core.wrappers.observation_normalization.observation_normalization_wrapper.ObservationNormalizationWrapper:
# default behaviour
default_strategy: maze.normalization_strategies.MeanZeroStdOneObservationNormalizationStrategy
default_strategy_config:
clip_range: [~, ~]
axis: ~
default_statistics: ~
statistics_dump: statistics.pkl
sampling_policy:
_target_: maze.core.agent.random_policy.RandomPolicy
# observation with key action_mask gets excluded from normalization
exclude: [action_mask]
manual_config:
# observation pixel_image uses manually specified normalization statistics
pixel_image:
strategy: maze.normalization_strategies.RangeZeroOneObservationNormalizationStrategy
strategy_config:
clip_range: [0, 1]
axis: ~
statistics:
min: 0
max: 255
# observation feature_vector estimates normalization statistics via sampling
feature_vector:
strategy: maze.normalization_strategies.MeanZeroStdOneObservationNormalizationStrategy
strategy_config:
clip_range: [-3, 3]
# normalization statistics are computed along the first axis
axis: [0]
Details:
The default behaviour for observations without manual config is identical to example 1
observation pixel_image: behaves as the default in example 2
observation feature_vector:
By setting axis to [0] in the strategy_config each element in the observation gets normalized with an element-wise mean and standard deviation.
Why? A feature_vector has shape (d,). After collecting N observations for computing the normalization statistics we arrive at a stacked feature_vector-matrix with shape (N, 10). By computing the normalization statistics along axis [0] we get normalization statistics with shape (d,) again which can be applied in an elementwise fashion.
Additionally each element in the vector is clipped to range [-3, 3].
Note, that even though a manual config is provided for some observations you can still decide if you would like to use predefined manual statistics or estimate them from sampled observations.
Example 4: Using Custom Normalization Strategies¶
In case the normalization strategies provided with Maze are not sufficient for your use case you can of course implement and add your own strategies.
# @package wrappers
maze.core.wrappers.observation_normalization.observation_normalization_wrapper.ObservationNormalizationWrapper:
# default behaviour
default_strategy: my_project.normalization_strategies.custom.CustomObservationNormalizationStrategy
default_strategy_config:
clip_range: [~, ~]
axis: ~
default_statistics: ~
statistics_dump: statistics.pkl
sampling_policy:
_target_: maze.core.agent.random_policy.RandomPolicy
exclude: ~
manual_config: ~
When adding a new normalization strategy you (1) have to implement the ObservationNormalizationStrategy interface and (2) make sure that it is accessible within your Python path. Besides that you only have to provide the reference path of the pre-processor to use.
Example 5: Plain Python Configuration¶
If you are not working with the Maze command line interface but still want to reuse observation normalization directly within Python you can start with the code snippet below. It shows how to:
instantiate an observation normalized environment
estimate normalization statistics via sampling
reuse the estimated statistics for normalization for subsequent tasks such as training or rollouts
"""Contains an example showing how to use observation normalization directly from python."""
from maze.core.agent.random_policy import RandomPolicy
from maze.core.wrappers.maze_gym_env_wrapper import GymMazeEnv
from maze.core.wrappers.observation_normalization.observation_normalization_wrapper import \
ObservationNormalizationWrapper
from maze.core.wrappers.observation_normalization.observation_normalization_utils import \
obtain_normalization_statistics
# instantiate a maze environment
env = GymMazeEnv("CartPole-v0")
# this is the normalization config as a python dict
normalization_config = {
"default_strategy": "maze.normalization_strategies.MeanZeroStdOneObservationNormalizationStrategy",
"default_strategy_config": {"clip_range": (None, None), "axis": 0},
"default_statistics": None,
"statistics_dump": "statistics.pkl",
"sampling_policy": RandomPolicy(env.action_spaces_dict),
"exclude": None,
"manual_config": None
}
# 1. PREPARATION: first we estimate normalization statistics
# ----------------------------------------------------------
# wrap the environment for observation normalization
env = ObservationNormalizationWrapper.wrap(env, **normalization_config)
# before we can start working with normalized observations
# we need to estimate the normalization statistics
normalization_statistics = obtain_normalization_statistics(env, n_samples=1000)
# 2. APPLICATION (training, rollout, deployment)
# ----------------------------------------------
# instantiate a maze environment
training_env = GymMazeEnv("CartPole-v0")
# wrap the environment for observation normalization
training_env = ObservationNormalizationWrapper.wrap(training_env, **normalization_config)
# reuse the estimated the statistics in our training environment(s)
training_env.set_normalization_statistics(normalization_statistics)
# after this step the training env yields normalized observations
normalized_obs = training_env.reset()
Built-in Normalization Strategies¶
Normalization strategies simply specify the way how input observations are normalized.
Maze already comes with built-in normalization strategies. You can find a list and further details on the functionality of the respective strategies in the reference documentation.
The Bigger Picture¶
The figure below shows how observation normalization is embedded in the overall interaction loop and set the involved components into context.
It is located in between the
ObservationConversionInterface
(which converts environment MazeStates into machine readable observations) and the agent.
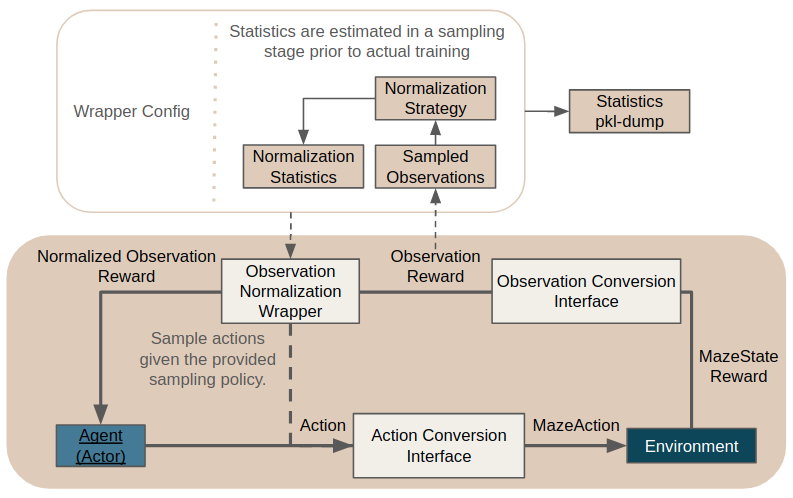
According to the sampling_policy specified in the config the wrapper collects observations from the interaction loop and uses these to estimate the normalization statistics given the provided normalization strategies.
The statistics get dumped to the pickle file specified in the config for subsequent rollouts or deploying the agent.
If normalization statistics are known beforehand this stage can be skipped by simply providing the statistics manually in the wrapper config.
Where to Go Next¶
Before normalizing your observations you first might want to pre-process them with the PreProcessingWrapper.
Learn about more general environment wrappers.