Rollouts¶
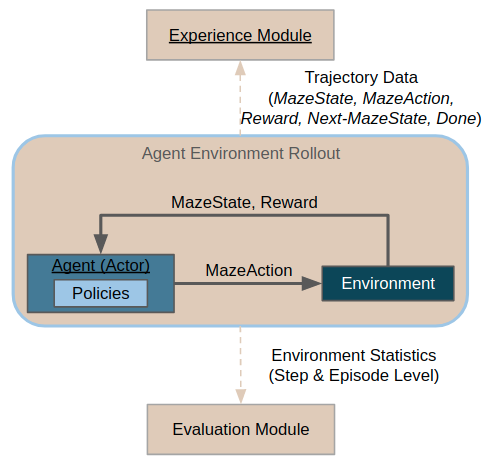
During rollouts, the agent interacts with a given environment, issuing actions obtained from a given policy (be it a heuristic or a trained policy).
Usually, the purpose of rollouts is either evaluation (or even deployment) of a given policy in a given environment, or collection of trajectory data. Collected trajectory data can later be used for further learning (e.g. imitation learning) or for inspecting the policy behavior more closely using trajectory viewers.
On this page:
The First Rollout demonstrates the main mechanics of running a rollout.
Rollout Runner Configuration explains how to configure the rollout runners.
Environment and Agent Configuration shows how to configure different environments and agents.
Finally, Plain Python Configuration shows how to run rollouts without the CLI.
The First Rollout¶
Rollouts can be run from the command line, using the maze-run command.
Rollout configuration (conf_rollout) is used by default. Hence, to run
your first rollout, it suffices to execute:
$ maze-run env=gym_env env.name=CartPole-v0
This runs a rollout of a random policy on cartpole environment. Statistics
from the rollout are printed to the console, and trajectory data with event logs
are stored in the output directory automatically configured by Hydra.
Alternatively, we might configure the rollouts to run just one episode in sequential mode and render the env (but more on that and other configuration options below):
$ maze-run env=gym_env env.name=CartPole-v0 runner=sequential runner.n_episodes=1 runner.render=true
Rollout Runner Configuration¶
Rollouts are run by rollout runners, which are agent- and environment-agnostic (for configuring environments and agents, see the following section).
By default, rollouts are run in multiple processes in parallel (as can be
seen in the rollout configuration file, which lists runner: parallel
in the defaults), and are handled by the ParallelRolloutRunner.
Alternatively, rollouts can be run sequentially in a single process by
opting for the sequential runner configuration:
$ maze-run env=gym_env env.name=CartPole-v0 runner=sequential
This is mainly useful when running a single episode only or for debugging, as sequential rollouts are much slower.
The available configuration options for both scenarios are listed in
the Hydra runner package (conf/runner/).
These are the parameters for parallel rollout runner:
# @package _group_
_target_: maze.core.rollout.parallel_rollout_runner.ParallelRolloutRunner
# Number of processes to run the rollouts in concurrently
n_processes: 5
# Total number of episodes to run
n_episodes: 50
# Max steps per episode to perform
max_episode_steps: 200
# If true, trajectory data will be recorded and stored in :code:`trajectory_data` directory
record_trajectory: true
# If true, event logs will be recorded and stored in `event_logs_directory
record_event_logs: true
# (Note that the default output directory is handled by Hydra)
Using these parameters, we can modify the rollout to e.g. be run only in 3 processes, and be comprised of 100 episodes, each of max 50 steps:
$ maze-run env=gym_env env.name=CartPole-v0 runner.n_processes=3 \
runner.n_episodes=100 runner.max_episode_steps=10
(Alternatively, you can create your own configuration file that you will then
supply to the maze-run command as described in Hydra primer section).
Environment and Policy Configuration¶
Environment and policy are configured using the env, resp. policy Hydra
packages. Rollout runners are environment- and agent-agnostic, and will attempt
to instantiate the type specified in the config files using Maze Factory.
Environment is expected to conform to the StructuredEnv interface and agent to
the StructuredPolicy interface.
For agents, there are the following example config files:
policy/random_policy.yamlfor instantiating a class that conforms to theStructuredPolicyinterface directlypolicy/cutting_2d_greedy_policy(inmaze-envs/logistics) for wrapping (potentially multiple) flat policies into a structured policypolicy/torch_policy(inmaze/train) for loading and rolling out a policy trained using the Maze framework
Hence, after training a policy on the tutorial Cutting 2D environment:
$ maze-run -cn conf_train env=tutorial_cutting_2d_struct_masked
wrappers=tutorial_cutting_2d model=tutorial_cutting_2d_struct_masked
We can roll it out using:
$ maze-run policy=torch_policy env=tutorial_cutting_2d_struct_masked wrappers=tutorial_cutting_2d \
model=tutorial_cutting_2d_struct_masked input_dir=outputs/[training-output-dir]
Note that for this to work, the training-output-dir parameter must be set to the output directory
of the training run (the model state dict and other configuration will be loaded from there).
Plain Python Configuration¶
Rollout runners are primarily designed to support running through Hydra from command line. That being said, you can of course instantiate and use the runners directly in Python if you have some special needs.
from maze.core.agent.dummy_cartpole_policy import DummyCartPolePolicy
from maze.core.rollout.sequential_rollout_runner import SequentialRolloutRunner
from maze.core.wrappers.maze_gym_env_wrapper import GymMazeEnv
# Instantiate an example environment and agent
env = GymMazeEnv("CartPole-v0")
agent = DummyCartPolePolicy()
# Run a sequential rollout with rendering
# (including an example wrapper the environment will be wrapped in)
sequential = SequentialRolloutRunner(
n_episodes=10,
max_episode_steps=100,
record_trajectory=True,
record_event_logs=True,
render=True)
sequential.run_with(
env=env,
wrappers={"maze.core.wrappers.reward_scaling_wrapper.RewardScalingWrapper": {"scale": 0.1}},
agent=agent)
Using the snippet above, you can run a rollout on any agent and environment directly from Python (parallel rollouts can be run similarly).
However, note that the rollout runners are currently designed to be run only once (which is their main use case for runs initiated from the command line). Running them repeatedly might cause some issues especially with statistics and event logging, as the runners initiate new writers every time (so you might get duplicate outputs) and some of these operations are order-sensitive (especially for the parallel rollouts where some state might be carried over to child processes).
Where to Go Next¶
If you collected trajectory data during the rollout, you might want to:
Visualize the collected rollout data in a trajectory viewer notebook
Use the collected data for imitation learning